 专注试管助孕服务,20年我们始终如一
专注试管助孕服务,20年我们始终如一
 包成功零风险,8000多个家庭共同选择
包成功零风险,8000多个家庭共同选择
 精选国内顶尖生殖中心,成功率有保障
精选国内顶尖生殖中心,成功率有保障
 13971193333
13971193333
专注试管助孕服务,20年我们始终如一
包成功零风险,8000多个家庭共同选择
精选国内顶尖生殖中心,成功率有保障
13971193333

阅读:7 发布时间:2023-07-01 22:02:38
在日常生活中,我们常见的轮子有汽车的轮子,火车的轮子,他们有一个共同的特点是:只能前后移动和转弯,不能横向移动,原地转圈那么能够横向移动和原地打转的轮子长什么样子呢?今天的文章就给大家呈现一般情况下,在平面上移动的物体可以实现前后、 左右和自转 3 个自由度的运动。
若所具有的自由度少于 3 个 , 则为非全方位移动平台,若具有完全的3个自由度,则称为全方位移动平台,这种平台非常适合工作在空间狭窄有限、对平台的机动性要求高的场合中能够实现全方位的移动,一种特殊的轮子是关键。
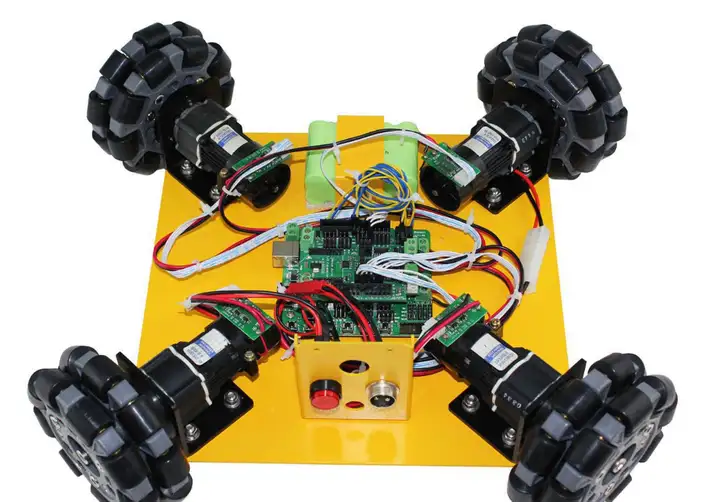
我们称之为全向轮常见的主要有麦克纳姆(Mecanum )轮和连续切换轮两种。麦克纳姆轮麦克纳姆轮由轮辐和固定在 外周的许多小滚子构成,轮子和滚子之间的夹角通常为45°。

每个轮子具有三个自由度,一个是绕轮子轴心 转动,第二个是绕滚子轴心转动,第三个是绕轮子和地面的接触点转动轮子由电机驱动,其余两个自由 度自由运动 由三个或以上的麦克纳姆轮可以构成全方位移动机器人平台麦克纳姆轮的滚子之间存在间隙,使得轮子在转动过程中同地面接触点的高度不断变化,导致车体振动或打滑。
通常的改进方法是采用多个滚子以减少滚子之间的间隙麦克纳姆轮的典型布置方式为H型布置。

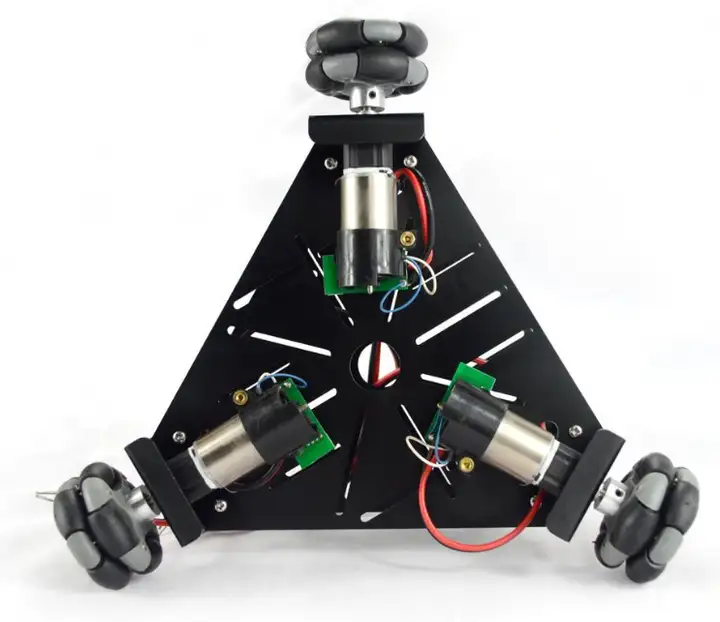
连续切换轮连续切换轮由一个轮盘和固定在轮盘外周的滚子构成。轮盘轴心同滚子轴心垂直,轮盘绕轴心由电机驱动转动,滚子依次与地面接触,并可绕自身轴心自由转动。

连续切换轮的轮辐上有两种滚子,分为内圈和外圈,都可以绕与轮盘轴垂直的轴心转动,具有公共的切面方向这样既保证了在轮盘滚动时同地面的接触点高度不变,避免机器人振动,也保证了在任意位置都可以实现沿与轮盘轴平行方向的自由滚动。
连续切换轮的典型布置方式为三角形布置和十字形布置。
后续安排后续会逐步介绍单球机器人的制作过程。从机械结构到建模仿真到程序调试,一步一步带你体验单球机器人的制作过程。希望对你会有所帮助。微信公众号:搜索“大头嘟嘟”。


解放军东部战区19日在台岛周边组织海空联合战备警巡,举行海空···

【粉丝投稿】王先生近期身体有些不适,从网络上查找资料后决定尝···

7月20日,知名影视演员李勤勤通过社交账号更新了一段视频,视···

我国的手工业早在百年前的清朝末年,就因为世界经济的冲击而一蹶···

每个人都曾梦想仗剑走天涯,但大部分人都悄然无踪影少有人能直面···

作者:北极猪前几天秋天的第二个节气处暑过了,也宣告了今年夏天···
来源:经济参考报最新公布的关键经济数据显示,欧洲服务业意外萎···

图①:航拍位于龙南市关西镇的西昌围施鸿雄摄 图②:在龙南市杨···

北京首钢男篮在21日更新了2023-24赛季球员注册名单,其···

作者:Sunnice 前段时间和朋友聚会时喝到了这款范佳乐教···

 上一篇:
上一篇: 下一篇:
下一篇: